Multibody Dynamics Module Updates
As of version 5.5 of the COMSOL Multiphysics® software, you can use the Multibody Dynamics Module without the Structural Mechanics Module. New functionality and improvements to the module include modeling of roller chain sprocket assemblies and automatic creation of rigid domains and gears from geometry. Learn more about these multibody dynamics features below.
Multibody Dynamics Module, an Add-On to COMSOL Multiphysics®
In version 5.5, the Multibody Dynamics Module is an add-on to COMSOL Multiphysics® and no longer requires the Structural Mechanics Module. This change makes multibody dynamics modeling, including multiphysics couplings to electromagnetics, fluid flow, acoustics, heat transfer, etc., more easily accessible to a larger group of users.
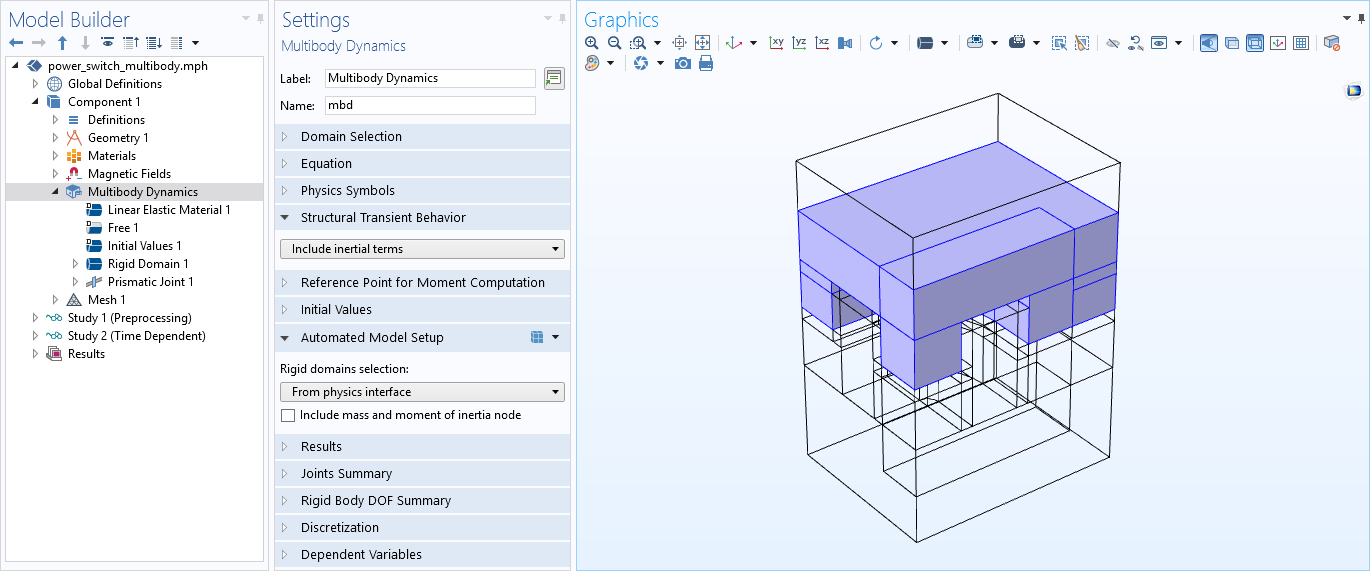
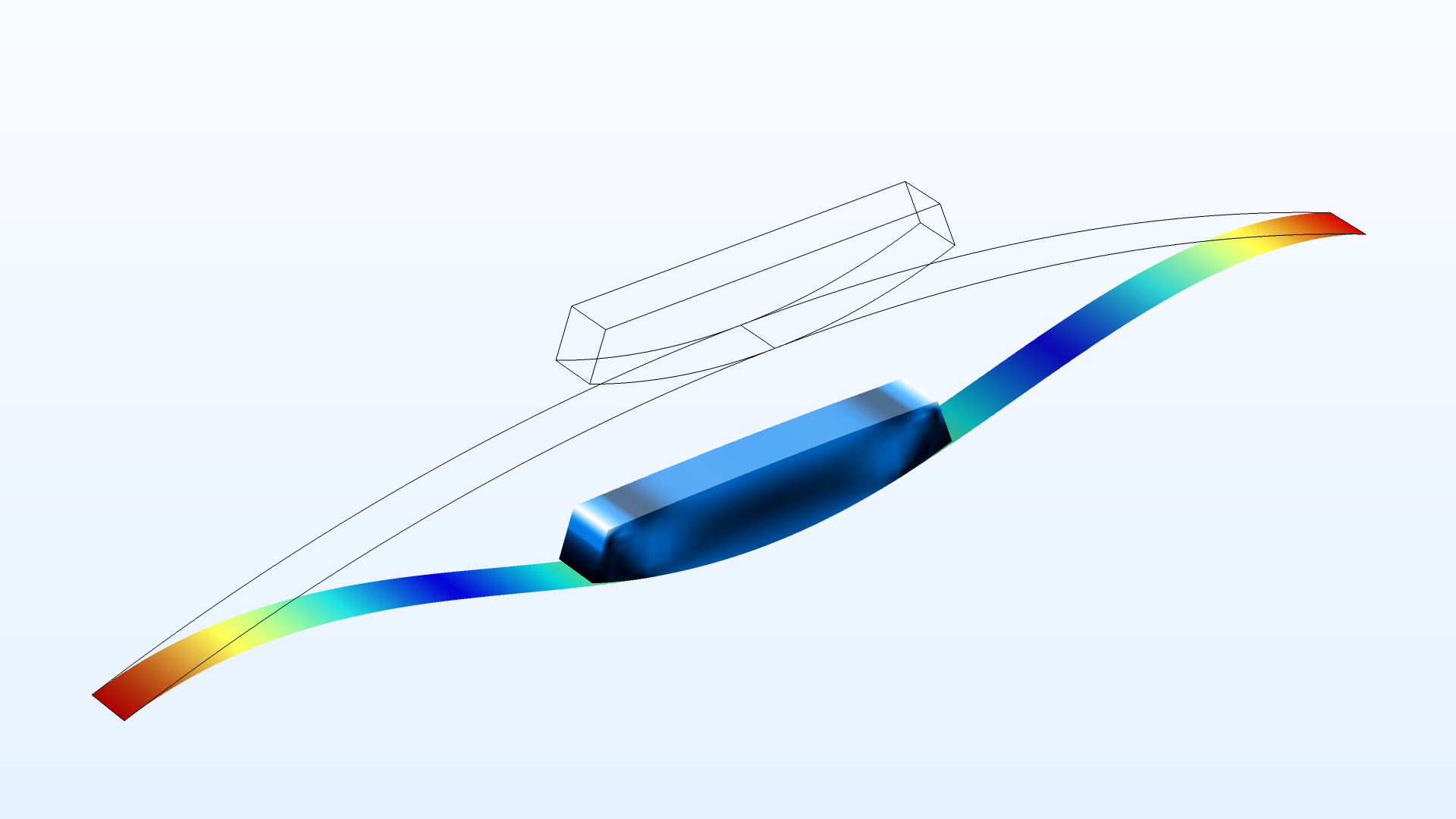
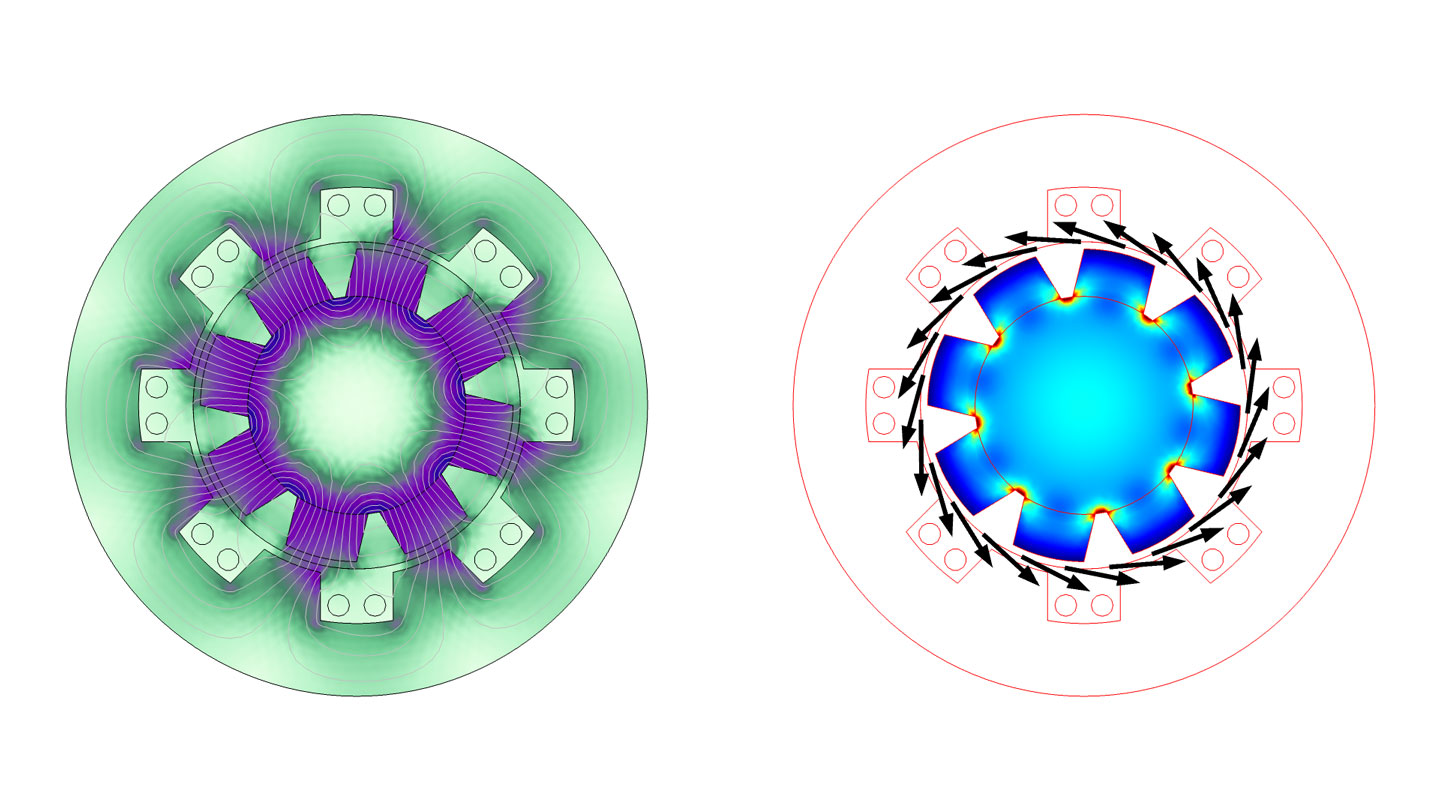
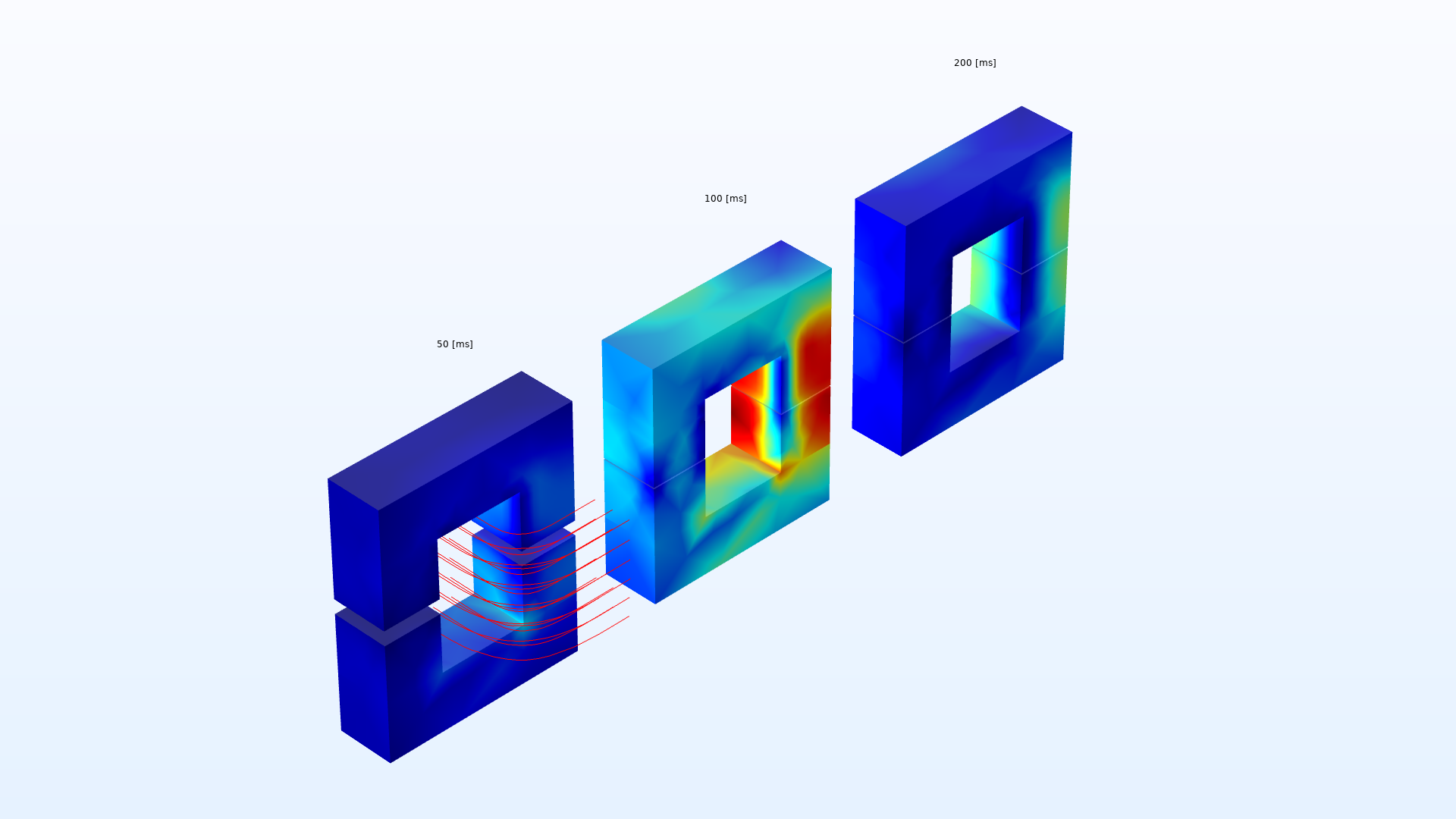
For more advanced multibody dynamics modeling, the Structural Mechanics Module is still useful, since it gives access to more advanced structural mechanics functionality, such as more sophisticated boundary conditions for elastic structures, shell and beam elements, as well as the Structural Mechanics Module add-on modules. The Electrodynamics of a Power Switch - Multibody Version model demonstrates using the Multibody Dynamics Module, without the Structural Mechanics Module, in combination with the AC/DC Module.
Roller Chain Sprocket Modeling
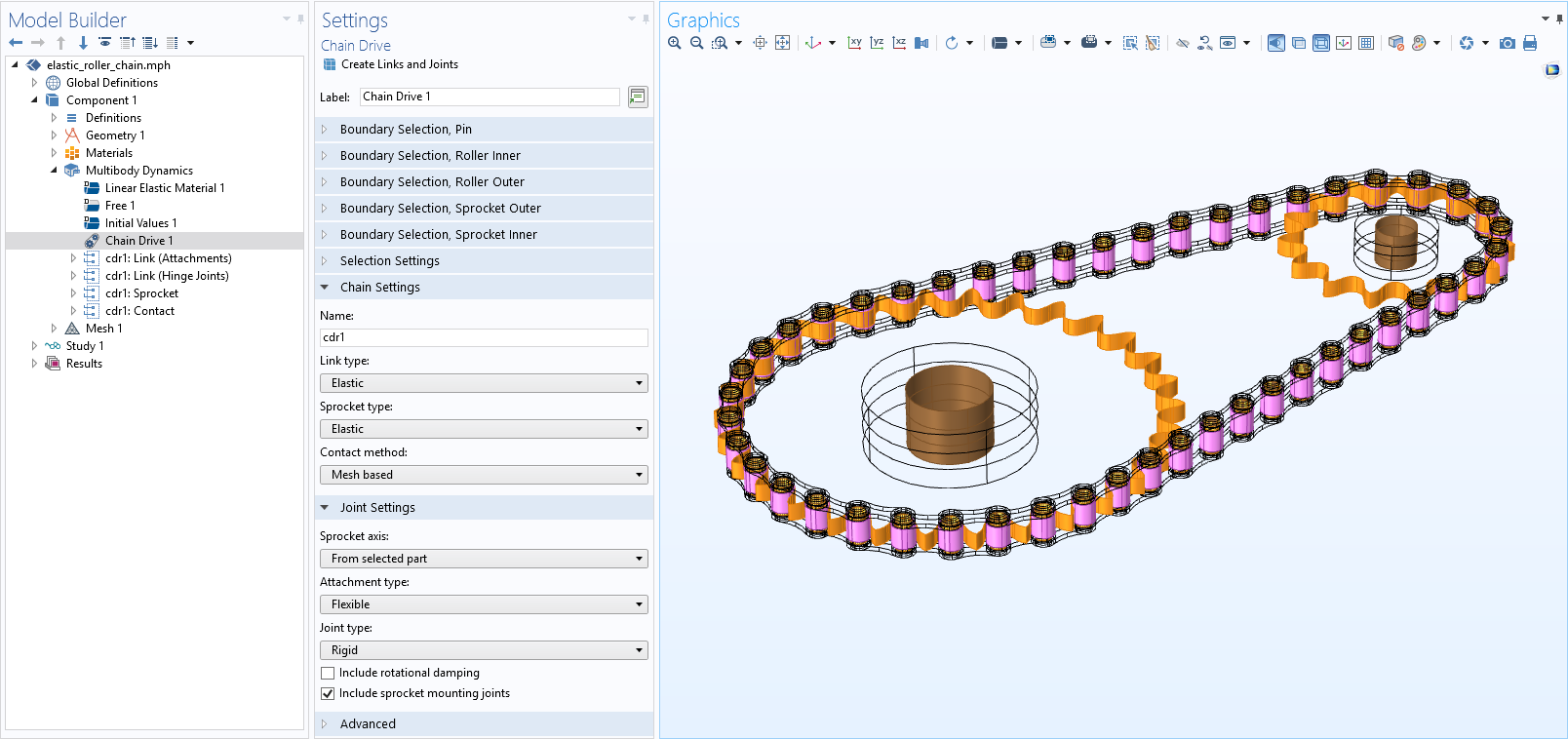
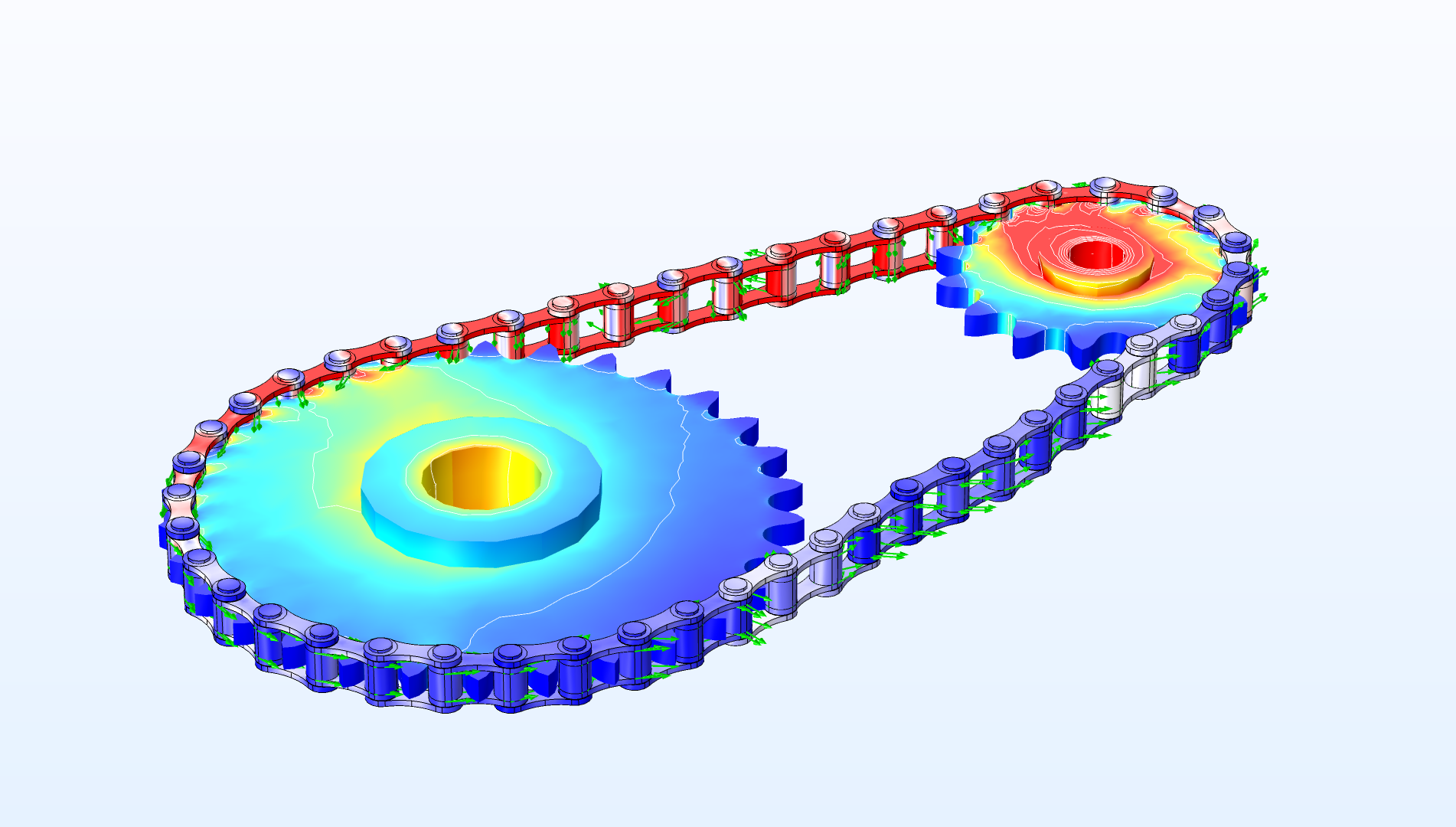
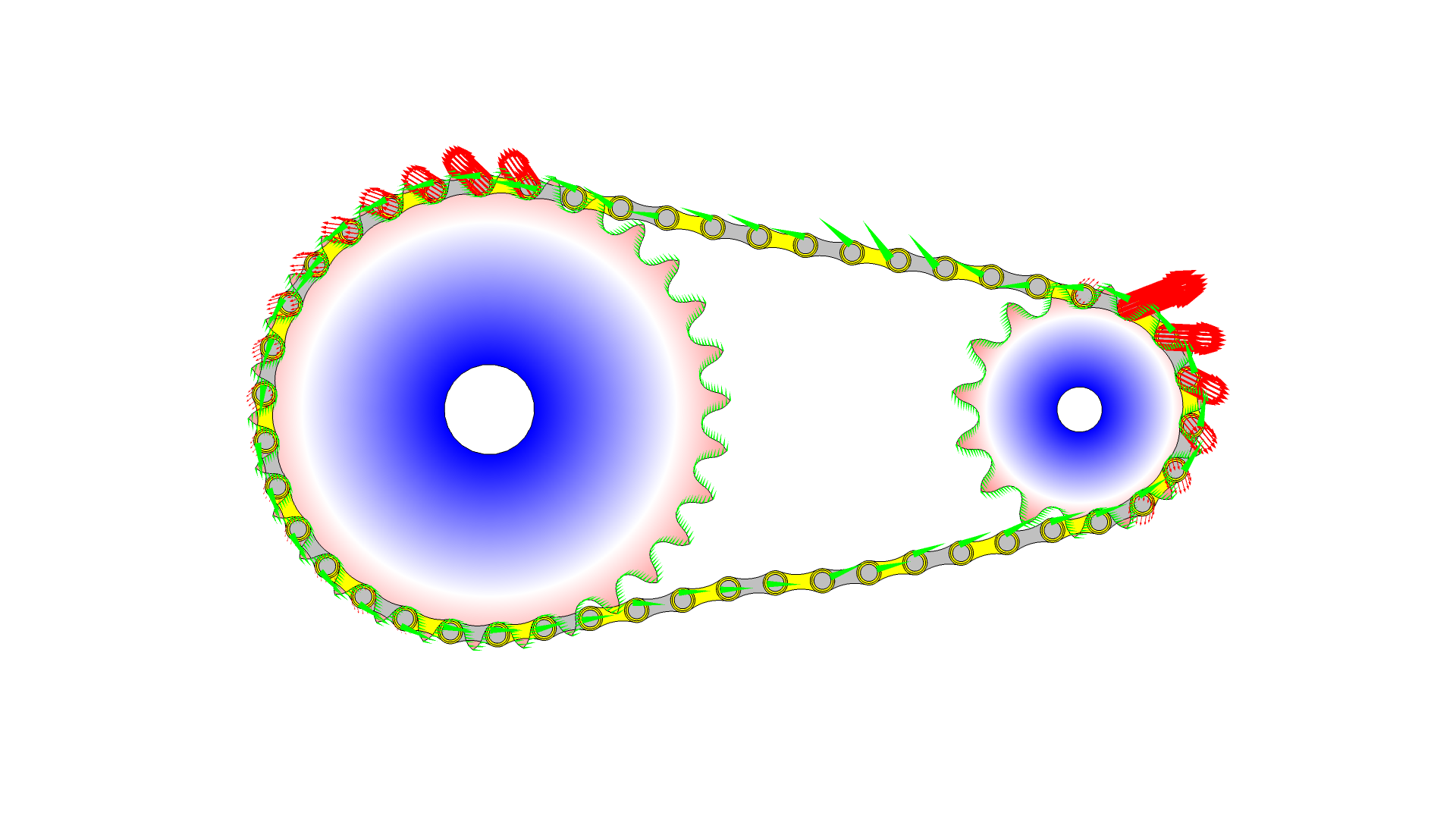
Modeling roller chain sprockets is now possible with the addition of a new Chain Drive feature, providing a framework for setting up such models. Sprockets and chain links can independently be defined as being rigid or elastic. There is a Create Links and Joints button, which automatically adds all the required Rigid Domain, Attachment, and Hinge Joint nodes. The contact between sprocket and chain links can be modeled using either a roller-center-based method or a mesh-based method. You can also model bushings and losses in the joints.
Additionally, to facilitate the modeling of chain drives, new geometry parts have been added to the Part Libraries. There are individual components of a sprocket or a roller chain, as well as a full roller chain sprocket assembly. In order to make the model setup fast and easy, the parts are highly parameterized, making use of selection color functionality, and provide selections such as links, joint boundaries, and contact boundaries to the physics interface. Then, in the Chain Drive node, all the relevant selections are automatically assigned when a chain geometry part is selected.
You can see this demonstrated in the Stress Analysis of a Roller Chain Sprocket Assembly and Dynamics of a Roller Chain Sprocket Assembly models.

Automated Model Setup
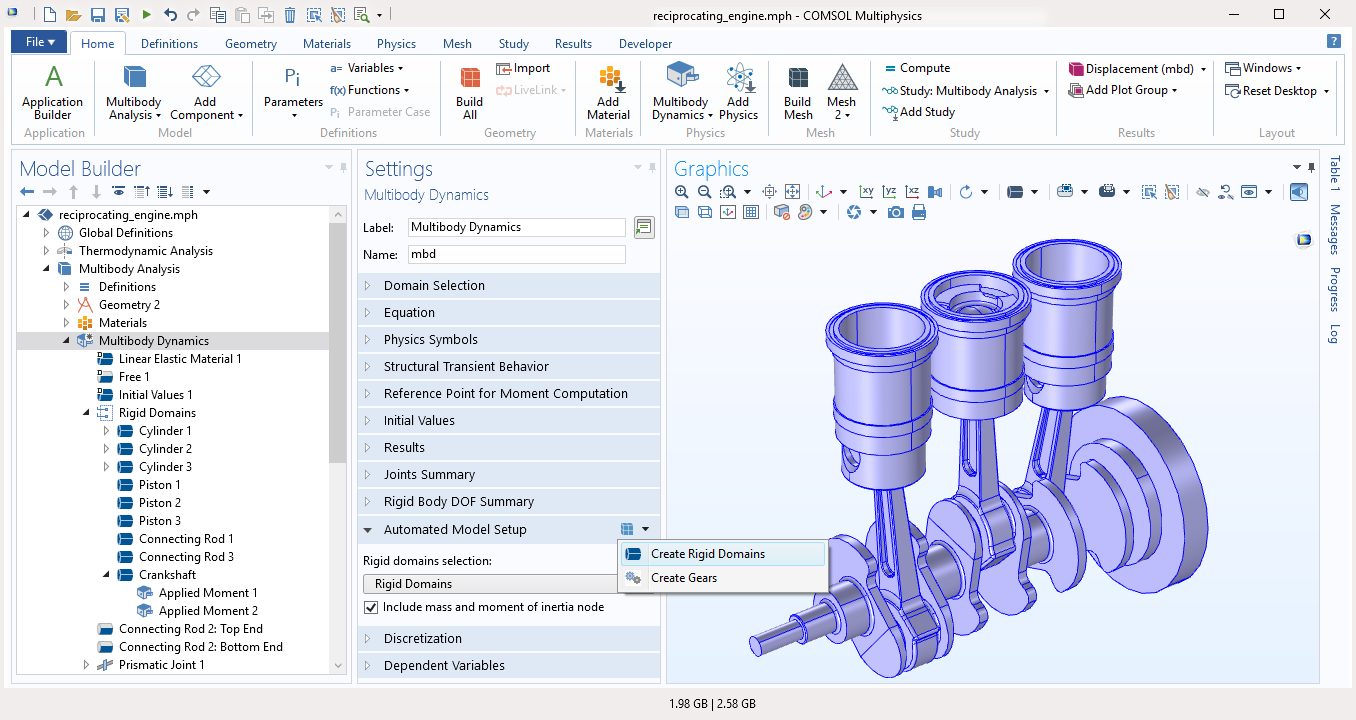
For large rigid multibody systems, a new section called Automated Model Setup has been added in the Multibody Dynamics interface node to automatically generate physics nodes based on geometric information. Using the Create Rigid Domains button, rigid domain nodes are generated for geometrically disconnected objects either on the entire physics selection or on a subset. You can also check a box to include Mass and Moment of Inertia subnodes automatically. This functionality is demonstrated in the Three-Cylinder Reciprocating Engine and Biomechanical Model of the Human Body in a Sitting Posture models.
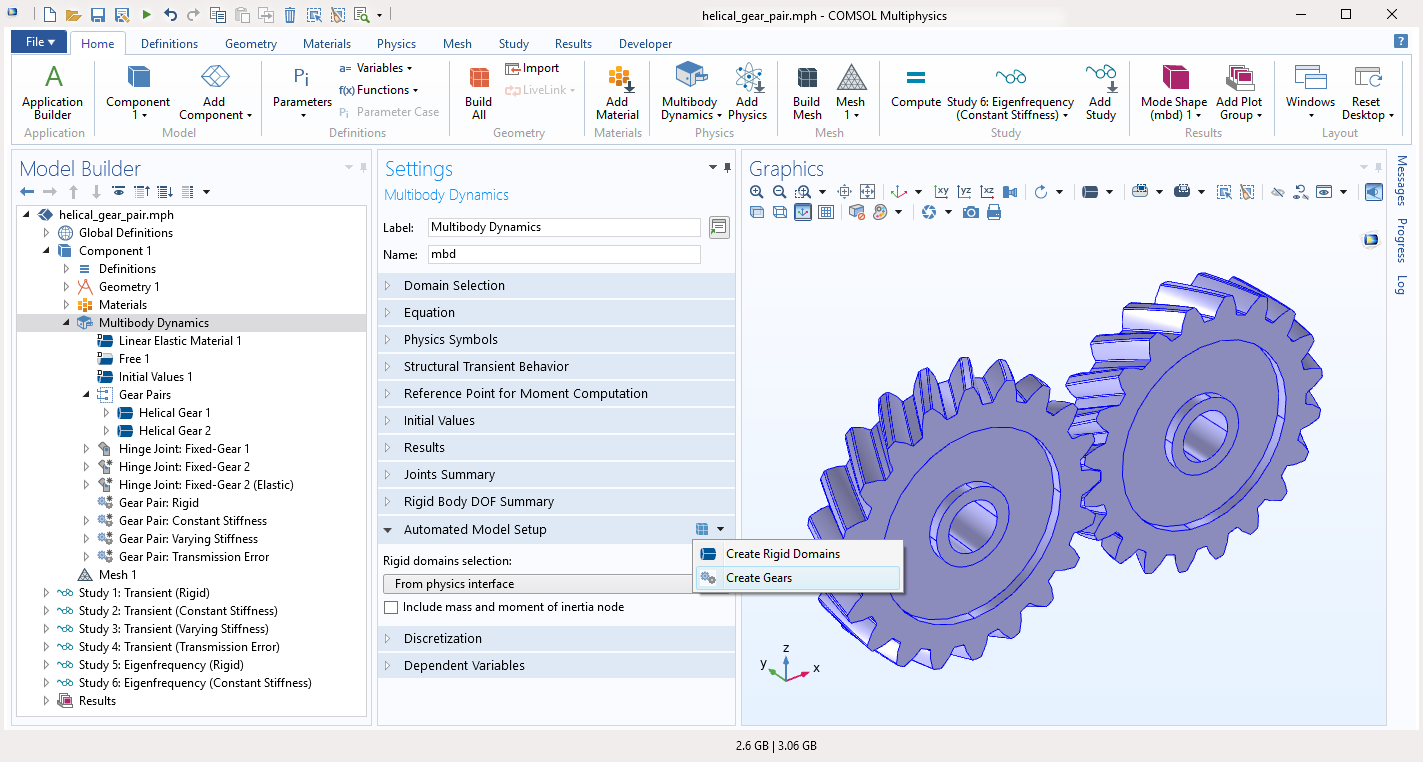
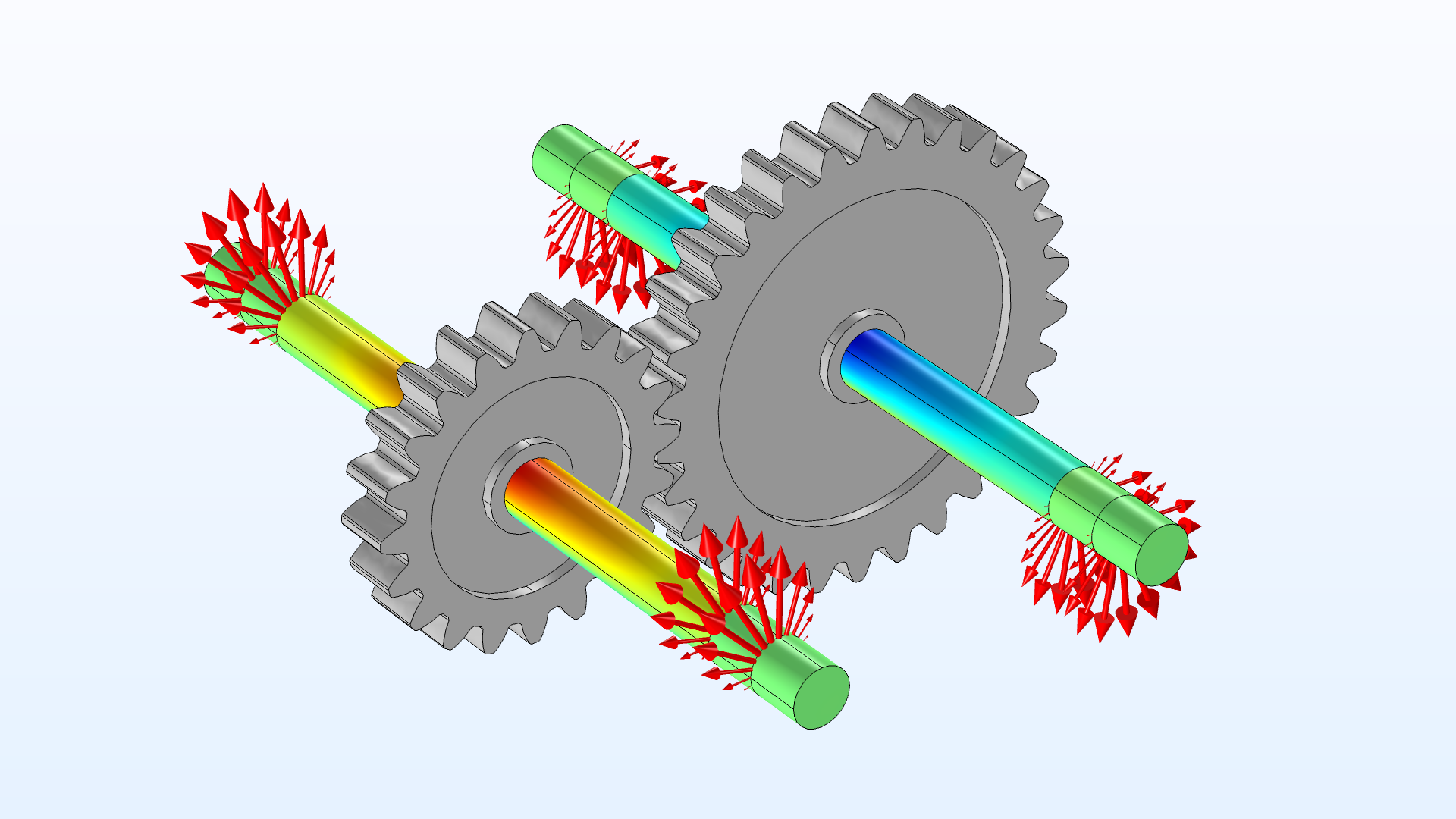
You can also use the automated model setup functionality to create gears from geometric information. Using the Create Gears button, different gear nodes are generated corresponding to each gear part present in the geometry. All of the gear parameters, such as the number of teeth, pitch diameter, pressure angle, gear center, and gear axis are automatically entered in the settings for the auto-generated gear nodes. By using this functionality, you avoid entering gear parameters twice, both in the geometry and in the physics settings, helping to speed up the model setup of geared multibody systems. This functionality is demonstrated in the Dynamics of Helical Gears and Forces and Moments of Bevel Gears models.
Contact Modeling Extensions
The contact modeling functionality has been extended to more physics interfaces, now available in: Solid Mechanics, Multibody Dynamics, Shell (new), Layered Shell (new), and Membrane (new). Additionally, you can analyze contact between boundaries modeled with any two of these interfaces. Similarly, contact can be modeled between a boundary on which any of these interfaces is active, and an arbitrary meshed part, even if the latter does not have physics assigned to it.
You can see this new functionality in the following models:
- block_on_arch (new model)
- instability_two_contacting_arches (new model)
- contacting_rings
- snap_hook
- snap_hook_penalty
- transient_rolling_contact
- hyperelastic_seal
Solid Mechanics on Rotating Domains
When modeling multiphysics problems in systems where there is a mixture of rotating and stationary domains, you can use the Solid Mechanics interface in a corotating configuration, such that only the deformations relative to the rotation are modeled. This is far more efficient than solving for the total displacements that include large global rotations. In many cases, it is even possible to use a linear formulation for the mechanical problem. To this end, the Rotating Frame feature provides a superposition of the rigid body rotation, and the relative displacements, for controlling the spatial frame on which the other physics interfaces are operating.
Visualization of Loads
Applied mechanical loads are now available as default plots in all structural mechanics physics interfaces. The loads plots are solution dependent, so both arrow directions and colors are updated when a dataset is updated with a new solution. Even abstract loads, such as forces and moments applied to rigid connectors and rigid domains, are plotted at their true point of application. A new arrow type, used for plotting applied moments, has been introduced for this functionality. More than 100 models are updated with this new functionality.

New Tutorial Models
Version 5.5 brings several new tutorial models.
Stress Analysis of a Roller Chain Sprocket Assembly
Application Library Title:
elastic_roller_chain
Dynamics of a Roller Chain Sprocket Assembly
Application Library Title:
roller_chain_dynamics
Shaft Vibration Due to Gear Rattle and Bearing Misalignment
Application Library Title:
gear_rattle_with_bearing_misalignment
Electrodynamics of a Power Switch - Multibody Version
Application Library Title:
power_switch_multibody