Multiphysics Simulation of Piezoelectrically Enhanced Soft Artificial Muscles
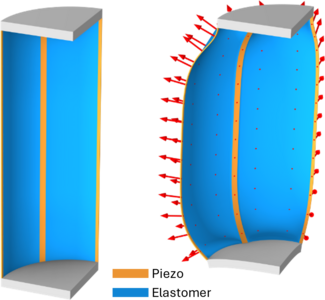
Artificial muscles are materials or devices that mimic the motion of muscles and can change their shape and stiffness in response to external stimuli. We consider pneumatic soft actuators with fiber reinforcements designed to contract upon pressurization and mimic the motion of skeletal muscle. This design uses superimposed piezoelectric ribbons on the pneumatic muscle to better control and modify muscle shape, as shown in Figure 1. This enables the artificial muscle to achieve actuation modes not possible with pneumatic input only.
We model the behavior of the artificial muscle in COMSOL Multiphysics®. Our models use the Solid Mechanics and Electrostatics interfaces in the Structural Mechanics and AC/DC modules, respectively, as well as the Curvilinear Coordinates interface. The finite element model of the piezoelectrically enhanced soft artificial muscle resolves the key physics present in the actuation of the muscle and demonstrate its response to pneumatic, electrostatic, and combined stimuli (see Figure 2).
We use the model to determine the optimal artificial muscle shape and geometry, as well as input pressure and voltage for actuation. The optimization would be time consuming and expensive if pursued solely through experimental prototyping and testing. As we showcase in this work, simulation can greatly facilitate the design process of such artificial muscles, rapidly accelerating the iterative process of evaluating different geometries, materials and loading scenarios. This work demonstrates the power of multiphysics simulation in COMSOL to predict the response of artificial muscles over a range of stimuli to help accelerate their design and development.